1. Giới thiệu
Trong những năm gần đây, UAV (Unmanned Aerial Vehicle) hay còn gọi là thiết bị bay chụp không người lái, đang trở thành một trong những công nghệ nổi bật với khả năng ứng dụng rộng rãi trong nhiều lĩnh vực như nông nghiệp, lâm nghiệp, xây dựng, khảo sát địa hình, phòng chống thiên tai, cứu hộ cứu nạn và thậm chí cả an ninh quốc phòng [1-7]. Tận dụng khả năng linh hoạt về thời gian và không gian, công nghệ UAV cho phép công tác thu thập dữ liệu một cách nhanh chóng, nhưng vẫn đảm bảo độ chính xác cao [4] với hình ảnh có độ phân giải vượt trội so với nhiều nguồn ảnh viễn thám khác như ảnh vệ tinh. Trong khi ảnh vệ tinh bị giới hạn bởi các yếu tố như thời tiết (mây che phủ, sương mù), quỹ đạo bay cố định hay chu kỳ chụp lặp dài, ngược lại UAV có thể chủ động về thời gian, độ cao bay chụp thấp, hoạt động hiệu quả ở những khu vực có địa hình phức tạp như rừng rậm, đồi núi hoặc vùng ven biển, đây là những vùng mà các hệ thống thu nhận dữ liệu truyền thống thường gặp nhiều khó khăn hay tín hiệu phản hồi bị nhiễu [5]. Bên cạnh đó, chi phí triển khai bay chụp UAV tương đối thấp so với chi phí mua ảnh vệ tinh thương mại có độ phân giải cao. Công nghệ UAV còn giúp giảm thiểu thời gian và nguồn nhân lực, đồng thời tăng tính chủ động và năng suất trong giám sát định kỳ hoặc ứng phó nhanh với các tình hình nguy cấp như sạt lở, cháy rừng, ngập lụt... [2,5]. Chính vì vậy, những ưu điểm vượt trội này giúp cho công nghệ UAV trở thành công cụ đắc lực, không thể thiếu trong các nghiên cứu và ứng dụng liên quan đến giám sát tài nguyên môi trường và cũng như theo dõi hiện trạng lớp phủ bề mặt [1,6,7].
Trong bối cảnh biến đổi khí hậu ngày càng diễn biến phức tạp, việc theo dõi và phân tích lớp phủ bề mặt trở thành một nhiệm vụ quan trọng, đóng vai trò then chốt trong công tác quản lý, đánh giá hiện trạng và hoạch định các chính sách thích ứng. Thông tin về lớp phủ bề mặt không chỉ hỗ trợ thành lập bản đồ hiện trạng lớp phủ mà còn giúp giám sát các biến động theo thời gian, phát hiện các xu hướng thay đổi trong cảnh quan do tác động của con người hoặc các yếu tố tự nhiên gây ra. Tuy nhiên, việc cập nhật thường xuyên dữ liệu lớp phủ là cơ sở để ra quyết định nhanh chóng và hiệu quả. Mặt khác, một thách thức lớn đặt ra trong quá trình phân tích lớp phủ là lựa chọn thuật toán phân loại phù hợp với từng loại ảnh, từng khu vực địa lý hoặc tuỳ vào giai đoạn thời gian cụ thể. Mỗi thuật toán phân loại đều có những ưu và nhược điểm riêng và hiệu quả của chúng có thể thay đổi đáng kể tùy thuộc vào điều kiện dữ liệu đầu vào như độ phân giải, loại cảm biến, mức độ nhiễu hay đặc điểm lớp phủ. Do đó, việc lựa chọn phương pháp phân loại luôn đòi hỏi sự cân nhắc giữa độ chính xác, khả năng tổng quát hóa và hiệu suất xử lý. Những năm qua, sự phát triển mạnh mẽ của trí tuệ nhân tạo và học máy (Machine Learning) đã mở ra hướng tiếp cận mới giúp nâng cao đáng kể hiệu quả trong phân loại ảnh viễn thám. Các thuật toán học máy như Random Forest (RF), Support Vector Machine (SVM), Classification and Regression Trees (CART), … đã được tích hợp rộng rãi trong các nghiên cứu và ứng dụng thực tiễn cho thấy khả năng vượt trội trong việc xử lý dữ liệu lớn [6-8].
Dựa trên những cơ sở lý thuyết về công nghệ UAV và các ứng dụng thực tiễn đã được trình bày, bài báo này được thực hiện với mục tiêu chính là giám sát lớp phủ bề mặt (land cover) gồm mặt nước, thực vật, đường giao thông, đất trống, nhà ở, phương tiện (xe hơi, xe tải), bãi đậu xe và tàu/thuyền thông qua ảnh chụp UAV. Đồng thời, phân tích và đánh giá khả năng phân loại lớp phủ bề mặt của hai thuật toán học máy phổ biến: Random Forest (RF) và Support Vector Machine (SVM), được triển khai trên phần mềm ArcGIS Pro. Trong đó, Random Forest (RF) có khả năng xử lý dữ liệu phức tạp, không nhạy cảm với nhiễu và cung cấp kết quả ổn định nhờ cơ chế kết hợp nhiều cây quyết định (Decision Trees) trong quá trình huấn luyện [8,9,11]. Đối với Support Vector Machine (SVM) lại hiệu quả trong việc phân loại các đối tượng có biên phân lớp phi tuyến, nhờ sử dụng các hàm kernel để mở rộng không gian đặc trưng, đồng thời vẫn đạt độ chính xác cao ngay cả với tập dữ liệu huấn luyện nhỏ [8,10-12]. Do đó, cả hai thuật toán này phù hợp phân loại nhiều lớp phủ trên ảnh UAV độ phân giải cao. Việc kết hợp và so sánh không chỉ giúp nâng cao độ tin cậy trong phân loại lớp phủ bề mặt mà còn tăng khả năng chọn lựa mô hình phù hợp nhất với mục tiêu nghiên cứu [7,8].
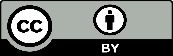
Thực nghiệm bay chụp ảnh UAV đã được tiến hành tại khu vực Quận 4, Thành phố Hồ Chí Minh với diện tích khoảng 8,1 ha vào năm 2017 bằng thiết bị flycam Phantom là một trong những dòng UAV dân dụng phổ biến có khả năng thu nhận ảnh chất lượng cao. Trong quá trình bay chụp, thu thập được 100 ảnh có độ phân giải cao với mức độ chồng lấp (overlap) giữa các ảnh lớn hơn 70% nhằm bảo đảm yêu cầu về độ phủ ảnh phục vụ cho các quy trình xử lý, tạo điểm đám mây, xây dựng ảnh trực giao và đặc biệt là phân loại lớp phủ bề mặt. Hình 1 thể hiện địa điểm bay chụp với các vị trí chấm xanh tương ứng là tâm ảnh, được hiển thị trên phần mềm Agisoft. Việc biểu diễn các tâm ảnh này giúp minh họa rõ ràng phạm vi và bố trí của các điểm ảnh thu thập được trong quá trình bay UAV.
Hình 1. Khu vực bay chụp
Mặc dù dữ liệu thu thập không còn mang tính thời sự, cập nhật hiện nay, tuy nhiên, vẫn mang giá trị nghiên cứu khoa học cao. Cụ thể, bộ dữ liệu này cung cấp một nền tảng thực nghiệm thích hợp để đánh giá hiệu quả của việc tích hợp dữ liệu ảnh UAV có độ phân giải cao với các thuật toán học máy tiên tiến trong phân tích và giám sát lớp phủ bề mặt đô thị. Việc ứng dụng hai thuật toán học máy phổ biến là Random Forest (RF) và Support Vector Machine (SVM) trên ảnh UAV mang lại cái nhìn sâu sắc về khả năng phân loại chính xác các loại lớp phủ như nhà ở, cây xanh, mặt nước, đường giao thông, phương tiện giao thông (xe hơi, xe tải)… trong môi trường đô thị phức tạp. Quan trọng hơn, bài báo này góp phần khẳng định tính thực tiễn và ứng dụng rộng rãi của dữ liệu ảnh UAV trong công tác giám sát tài nguyên đất đai, hỗ trợ ra quyết định quy hoạch đô thị và quản lý môi trường. Qua đó, nhằm chứng minh tiềm năng của việc kết hợp công nghệ bay chụp không người lái với các mô hình học máy trong lĩnh vực phân tích dữ liệu không gian hiện đại.
2. Phương pháp nghiên cứu
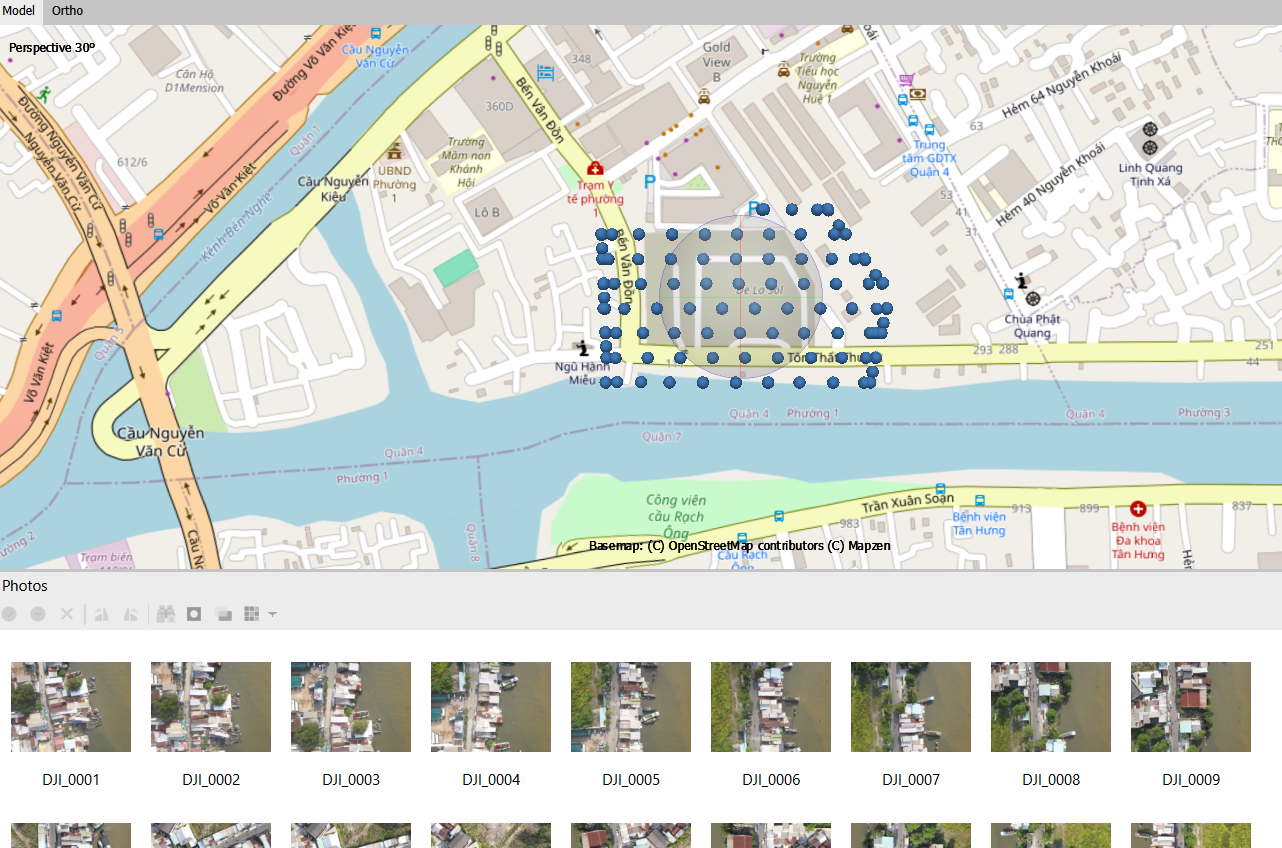
Để giám sát lớp phủ bề mặt đô thị tại quận 4, TP. Hồ Chí Minh, nghiên cứu tập trung phân loại các đối tượng gồm (1) mặt nước, (2) thực vật, (3) đường giao thông, (4) đất trống, (5) nhà ở, (6) phương tiện (xe hơi, xe tải), (7) bãi đậu xe và (8) tàu/thuyền nhằm xây dựng bản đồ lớp phủ bề mặt phục vụ công tác quản lý không gian đô thị. Dữ liệu UAV được xử lý để xây dựng ảnh trực giao có độ phân giải cao và đồng thời, phân loại bằng các thuật toán Machine Learning, như trình bày ở Hình 2.
Hình 2. Quy trình thực hiện
Trong đó, phương pháp xử lý tập ảnh UAV được thực hiện trên phần mềm Agisoft Metashape Professional thông qua các thuật toán thị giác máy tính giúp chuyển đổi dữ liệu ảnh thô thành sản phẩm bản đồ có độ chính xác cao [13]. Quá trình xử lý ảnh bao gồm các bước ghép ảnh, nắn chỉnh ảnh về đúng hệ toạ độ VN2000 với kinh tuyến trục 105045” nhờ vào 6 điểm khống chế mặt đất. Tiến hành tạo điểm đám mây (Point Cloud) với mật độ điểm dày đặc nhằm đảm bảo cung cấp đầy đủ thông tin về bề mặt địa hình cũng như các đối tượng tự nhiên (cây cối, mặt nước, …) hay các công trình nhân tạo (nhà, đường giao thông, phương tiện,..). Sau cùng xây dựng ảnh trực giao (hay còn gọi bình đồ ảnh) là ảnh đã được hiệu chỉnh để loại bỏ biến dạng do góc nhìn và độ cao nhằm tạo ra bản đồ ảnh chính xác theo tỷ lệ [13] phục vụ cho bước phân loại tiếp theo.
Các lớp phủ bề mặt trên ảnh trực giao được phân loại bằng phương pháp học máy Machine Learning trên phần mềm ArcGIS Pro - một nền tảng GIS toàn diện, mạnh mẽ, có khả năng xử lý và phân tích dữ liệu không gian từ nhiều nguồn khác nhau, đặc biệt phù hợp với xu hướng tích hợp dữ liệu UAV và trí tuệ nhân tạo trong giám sát và quản lý tài nguyên hiện nay. Bài báo sử dụng hai thuật toán học máy có giám sát phổ biến để thực hiện phân loại ảnh UAV: Random Forest (RF) và Support Vector Machine (SVM).
Thuật toán Random Forest, do Breiman đề xuất vào năm 2001, là một phương pháp dựa trên nguyên lý rừng cây quyết định, trong đó nhiều cây quyết định (Decision Trees) được xây dựng độc lập trên các tập dữ liệu con được lấy mẫu ngẫu nhiên có hoàn lại (bootstrap sampling). Mỗi cây chỉ xem xét một tập con ngẫu nhiên các đặc trưng tại mỗi nút phân chia, từ đó tạo nên sự đa dạng giữa các cây trong rừng. Kết quả phân loại cuối cùng được xác định theo nguyên tắc bỏ phiếu đa số giữa các cây.Cách tiếp cận này giúp giảm phương sai mô hình, nâng cao độ chính xác và độ ổn định của quá trình phân loại, đồng thời hạn chế hiện tượng quá khớp (overfitting), vốn thường gặp khi xử lý dữ liệu phức tạp như ảnh UAV. Đặc biệt, với ảnh UAV có độ phân giải cao và chứa nhiều đặc trưng phổ - hình học, RF có thể khai thác hiệu quả toàn bộ thông tin đầu vào để phân loại chính xác các lớp phủ bề mặt như: thực vật, mặt nước, nhà ở, đường giao thông và đất trống. Ngoài ra, RF còn được đánh giá cao nhờ khả năng dễ triển khai, hiệu suất ổn định và khả năng kháng nhiễu, ngay cả khi số lượng mẫu huấn luyện không lớn. Nhờ những ưu điểm này, RF đã trở thành một lựa chọn phổ biến trong lĩnh vực viễn thám và lập bản đồ lớp phủ từ dữ liệu UAV [8–10].
Bên cạnh RF, bài báo còn sử dụng Support Vector Machine (SVM) – một thuật toán phân loại mạnh mẽ cũng thuộc nhóm học máy có giám sát. SVM hoạt động dựa trên nguyên lý tìm kiếm một siêu phẳng (hyperplane) tối ưu nhằm phân tách các nhóm dữ liệu khác nhau sao cho khoảng cách từ siêu phẳng đến các điểm dữ liệu gần nhất của mỗi nhóm (các vector hỗ trợ – support vectors) là lớn nhất. Điều này giúp tăng cường khả năng phân biệt giữa các lớp, đặc biệt trong trường hợp dữ liệu có biên phân tách hẹp hoặc phức tạp. Khi áp dụng cho ảnh trực giao từ UAV, SVM cho thấy hiệu quả cao trong việc nhận dạng các loại lớp phủ bề mặt như: thực vật, mặt nước, đất trống, nhà ở, đường và phương tiện. Nhờ khả năng tối ưu hóa ranh giới giữa các lớp, SVM đặc biệt hữu ích trong việc phân biệt các lớp có phổ tương đồng. Tuy nhiên, hiệu quả của SVM phụ thuộc nhiều vào việc lựa chọn đúng hàm kernel cũng như tối ưu các tham số như hệ số C và gamma. Nếu được hiệu chỉnh hợp lý, SVM có thể mang lại kết quả phân loại ổn định và chính xác, ngay cả trong trường hợp dữ liệu huấn luyện còn hạn chế – một đặc điểm thường gặp trong xử lý ảnh UAV [8, 10-12].
Ngoài ra, trước khi thực hiện phân loại, bài báo tiến hành tạo Segmentation nhằm phân chia ảnh raster thành các vùng (segments) đồng nhất, dựa trên các đặc điểm như: màu sắc (giá trị pixel), hình dạng, độ liền mạch không gian. Mỗi vùng kết quả gọi là một đối tượng ảnh (image object), được dùng để phân tích và phân loại thay vì từng pixel riêng lẻ với công cụ Segmentation trong Imagery đối với ảnh orthomosaic. Sau đó, thực hiện chọn mẫu huấn luyện bằng công cụ Training Sample Manager với 1533 mẫu (Hình 3) trong đó mặt nước (107), thực vật (247), đường (197), đất trống (92), nhà (687), phương tiện (114), bãi đậu xe (76), thuyền (10). Quá trình phân loại lớp phủ được thực hiện bởi công cụ Image Classification Wizads trong Imagery và đồng thời chọn lần lượt thuật toán RF và SVM. Cuối cùng, xử lý ảnh sau phân loại giúp tạo các vùng lớp phủ được phân tách rõ ràng, trực quan bằng công cụ Majority Filter và Reclassify.
|
| ||
Hình 3. Mẫu huấn luyện phân loại | Hình 4. Mẫu đánh giá độ chính xác |
| |
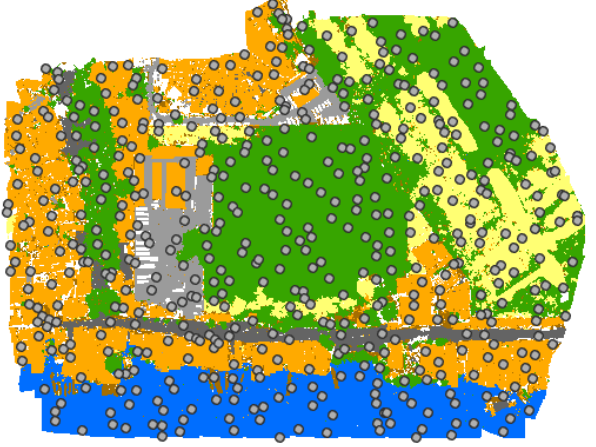
Phương pháp đánh giá độ chính xác sau phân loại. Sử dụng công cụ Create Accuracy Assessment Points trong ArcGIS Pro để tạo ra các điểm kiểm định ngẫu nhiên (Stratified random) dựa trên kết quả raster phân loại của 2 thuật toán với tổng số lượng mẫu đánh giá là 500 điểm (Hình 4) nhằm đối chiếu với Google Earth Pro. Để so sánh tính hiệu quả trong phân loại, cũng như độ tin cậy của 2 thuật toán, bài báo thực hiện xây dựng ma trận sai số (Confusion Matrix), tính toán độ chính xác tổng thể (Overall Accuracy) và hệ số Kappa (Kappa Coefficient). Trong đó, hệ số Kappa là chỉ số thống kê phản ánh mức độ đồng thuận giữa kết quả phân loại và dữ liệu tham chiếu, có xét đến khả năng xảy ra sự đồng thuận do ngẫu nhiên. Giá trị Kappa dao động từ 0 đến 1, trong đó giá trị càng gần 1 thể hiện mức độ phân loại càng chính xác và đáng tin cậy [14]. Khác với độ chính xác tổng thể (Overall Accuracy), hệ số Kappa cung cấp một cách tiếp cận nghiêm ngặt hơn, đặc biệt hiệu quả trong các trường hợp dữ liệu phân bố không đồng đều giữa các lớp.
3. Kết quả nghiên cứu và thảo luận
3.1. Kết quả nghiên cứu
3.1.1. Kết quả phân loại lớp phủ bề mặt theo thuật toán Machine Learning
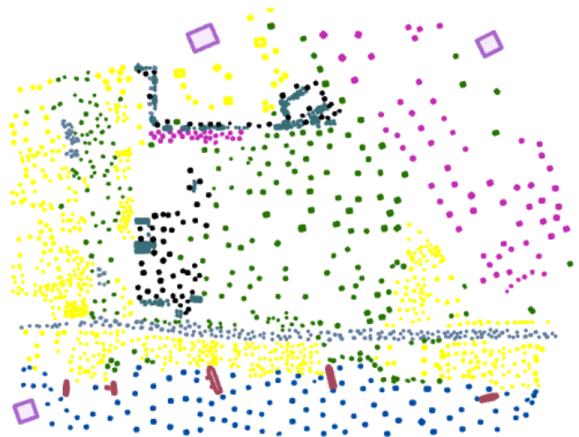
Sau khi xử lý dữ liệu ảnh UAV, kết quả ảnh trực giao được xây dựng có độ phân giải rất cao với 2,57 cm/pixel (Hình 5) và được tạo bởi 9,5 triệu điểm đám mây (point cloud) cho phép tái hiện chi tiết và trực quan các đối tượng trên bề mặt địa hình tại khu vực nghiên cứu. Độ chi tiết này đóng vai trò đặc biệt quan trọng trong việc phân tích, nhận dạng và phân loại các đặc điểm không gian của các loại lớp phủ.
|
|
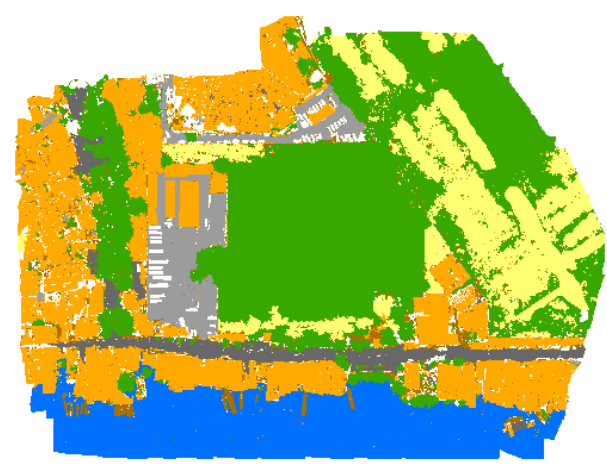
Hình 5. Ảnh trực giao | Hình 6. Lớp phủ với Random Forest |
|
|
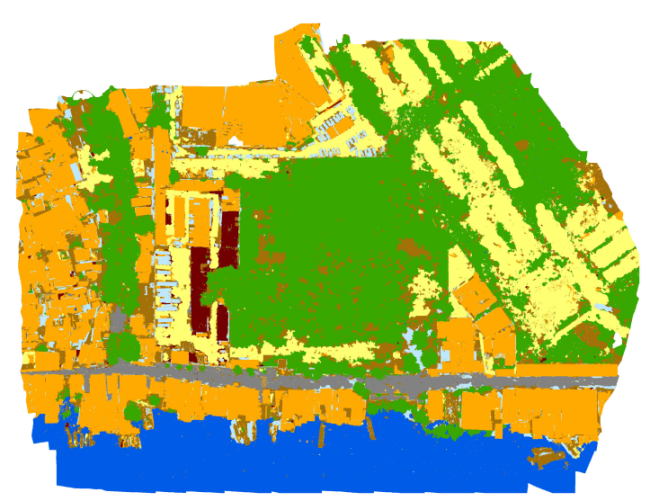
| Hình 7. Lớp phủ với SVM |
Kết quả phân loại lớp phủ bề mặt lần lượt bằng thuật toán Random Forest (RF) và Support Vector Machine (SVM) được thể hiện qua Hình 6 và Hình 7 với 8 loại lớp phủ gồm mặt nước, thực vật, đất trống, đường, nhà ở, phương tiện, bãi đậu xe và thuyền. Tuy nhiên, mỗi thuật toán lại thể hiện ưu và nhược điểm riêng trong quá trình phân loại. Cụ thể thuật toán Random Forest đã thể hiện khả năng phân loại ổn định và khá rõ nét ranh giới giữa các lớp phủ. Các lớp như thực vật và mặt nước được nhận diện rất rõ, đặc biệt là vùng thực vật (màu xanh lá) có sự liền mạch và ít bị phân mảnh. Ngoài ra, các lớp như nhà ở và đường cũng được phân biệt khá rõ, giúp bản đồ có tính trực quan cao và dễ dàng quan sát (Hình 6). Đối với thuật toán SVM có xuất hiện một số sai sót nhỏ, chẳng hạn như các vùng bị nhầm lẫn giữa lớp đường và đất trống hoặc giữa nhà ở và phương tiện (Hình 7).
3.1.2. Kết quả đánh giá độ chính xác sau phân loại lớp phủ bề mặt
Qua bảng 1 ma trận sai số cho thấy, mô hình phân loại ảnh UAV bằng thuật toán Random Forest hoạt động khá hiệu quả, với độ chính xác toàn cục đạt 86,67% và hệ số Kappa là 0,83. Điều này cho thấy kết quả phân loại có sự thống nhất cao với dữ liệu thực địa, phản ánh khả năng mô hình nhận diện lớp phủ một cách đáng tin cậy. Các lớp như mặt nước, thực vật, đất trống và nhà được phân loại với độ chính xác cao. Trong đó, lớp mặt nước có độ chính xác người dùng cao 97,1%, cho thấy khả năng nhận diện rõ ràng và rất ít bị nhầm lẫn. Các lớp có đặc trưng hình thái và quang phổ rõ nét thường được phân loại chính xác hơn. Tuy nhiên, độ chính xác ở một số lớp nhỏ như phương tiện (26,3%) và thuyền (5,8%) thì khá thấp. Phương tiện và các lớp như nhà, thực vật hoặc bãi đậu xe có nhiều nhầm lẫn trong nhận diện màu sắc (pixel), hình dạng. Nguyên nhân có thể xuất phát từ diện tích vật thể nhỏ, xuất hiện tạm thời, bị che khuất hoặc có đặc tính phổ tương đồng với các lớp khác. Lớp thuyền là một trong những lớp có độ chính xác thấp nhất với độ chính xác người dùng chỉ đạt 5,8%. Nguyên nhân là do đặc điểm hình thái phức tạp của thuyền: trong một con thuyền thường có chứa nhiều vật dụng khác nhau, mỗi vật dụng có thể mang đặc trưng phổ khác nhau (ví dụ: mái che, động cơ, hàng hóa), dẫn đến việc mô hình dễ nhầm lẫn thuyền với các lớp như mặt nước, phương tiện hoặc nhà. Bên cạnh đó, trong quá trình chọn mẫu huấn luyện, nhóm đã khoanh vùng toàn bộ con thuyền làm một vùng đối tượng duy nhất để đảm bảo tính đầy đủ, tuy nhiên điều này lại làm tăng mức độ không đồng nhất về phổ trong mỗi mẫu. Do số lượng thuyền trong ảnh UAV không nhiều và có sự đa dạng về hình dáng, màu sắc, nên số mẫu huấn luyện cho lớp này cũng bị hạn chế, góp phần làm giảm độ chính xác khi phân loại. Từ những kết quả trên, có thể đánh giá rằng mô hình đã thực hiện tốt đối với các lớp ổn định, dễ nhận dạng. Tuy nhiên, để nâng cao hiệu quả phân loại với các lớp khó, nên tăng cường số lượng mẫu huấn luyện, cải thiện bước phân đoạn nhằm tăng khả năng phân biệt các đối tượng phức tạp hơn.
Bảng 1. Ma trận sai số với thuật toán Random Forest
Lớp phú | Mặt nước | Thực vật | Đường | Đất trống | Nhà | Phương tiện | Bãi đậu xe | Thuyền | Tổng | ĐCX người dùng |
Mặt nước | 68 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 70 | 97,1% |
Thực vật | 0 | 142 | 2 | 15 | 1 | 0 | 0 | 0 | 160 | 88,8% |
Đường | 0 | 0 | 18 | 0 | 2 | 0 | 0 | 0 | 20 | 90% |
Đất trống | 0 | 0 | 0 | 59 | 2 | 0 | 0 | 0 | 63 | 93,6% |
Nhà | 1 | 1 | 1 | 1 | 115 | 1 | 0 | 1 | 121 | 95,1% |
Phương tiện | 1 | 1 | 0 | 1 | 8 | 5 | 1 | 0 | 19 | 26,3% |
Bãi đậu xe | 0 | 0 | 9 | 0 | 3 | 1 | 21 | 0 | 25 | 84% |
Thuyền | 1 | 4 | 1 | 5 | 5 | 0 | 0 | 1 | 17 | 5,8% |
Tổng | 71 | 154 | 22 | 81 | 136 | 7 | 22 | 2 | 500 |
|
ĐCX nhà sản xuất | 95,7% | 92,2% | 81,8% | 72,8% | 84,5% | 71,4% | 95,4% | 50% |
|
|
Độ chính xác toàn cục | 86,6 % | |||||||||
Hệ số Kappa | 0,83 | |||||||||
Dựa trên ma trận sai số (Bảng 2), mô hình phân loại sử dụng thuật toán SVM đạt độ chính xác toàn cục 77,4% và hệ số Kappa 0,71 cho thấy mức độ phù hợp tương đối tốt với dữ liệu thực tế. Các lớp như mặt nước, thực vật, đường và nhà được phân loại khá chính xác, đặc biệt lớp mặt nước đạt độ chính xác người dùng 92,6%, phản ánh khả năng nhận diện vượt trội nhờ đặc trưng phổ rõ ràng. Tuy nhiên, các lớp có hình thái nhỏ, phức tạp hoặc phổ không ổn định như phương tiện, bãi đậu xe và thuyền cho kết quả chưa cao. Cụ thể, lớp phương tiện đạt 60%, thường bị nhầm lẫn với nhà ở hoặc đường. Nguyên nhân có thể bắt nguồn từ việc số lượng mẫu huấn luyện còn hạn chế, chưa phản ánh đầy đủ sự đa dạng phổ và hình học của các đối tượng trong từng lớp. Điều này ảnh hưởng trực tiếp đến khả năng phân tách của mô hình, đặc biệt đối với các lớp có đặc điểm phổ gần nhau. Để cải thiện hiệu quả phân loại, cần tăng cường số lượng và chất lượng mẫu huấn luyện, đặc biệt đối với các lớp khó.
Bảng 2. Ma trận sai số với thuật toán Support Vector Machine
Lớp phú | Mặt nước | Thực vật | Đường | Đất trống | Nhà | Phương tiện | Bãi đậu xe | Thuyền | Tổng | ĐCX người dùng |
Mặt nước | 63 | 1 | 0 | 0 | 2 | 0 | 0 | 2 | 68 | 92,6% |
Thực vật | 0 | 146 | 0 | 1 | 4 | 0 | 0 | 0 | 151 | 96,7% |
Đường | 0 | 2 | 11 | 1 | 0 | 1 | 0 | 0 | 15 | 73,3% |
Đất trống | 0 | 16 | 0 | 54 | 2 | 3 | 1 | 0 | 76 | 71% |
Nhà | 0 | 8 | 0 | 6 | 96 | 1 | 4 | 1 | 116 | 82,7% |
Phương tiện | 0 | 0 | 0 | 0 | 4 | 9 | 2 | 0 | 15 | 60% |
Bãi đậu xe | 0 | 2 | 0 | 1 | 0 | 0 | 7 | 0 | 10 | 70% |
Thuyền | 0 | 24 | 2 | 9 | 11 | 2 | 0 | 3 | 51 | 50,8% |
Tổng | 63 | 199 | 13 | 72 | 119 | 16 | 14 | 6 | 500 |
|
ĐCX nhà sản xuất | 100% | 73,3% | 84,6% | 75% | 80,6% | 56,2% | 50% | 50% |
|
|
Độ chính xác toàn cục | 77,4 % | |||||||||
Hệ số Kappa | 0,71 | |||||||||
Qua phân tích Bảng 1 và Bảng 2 cho thấy, mặc dù thuật toán SVM đạt kết quả khá tốt ở một số lớp khó như phương tiện và thuyền với độ chính xác người dùng cao hơn so với Random Forest (RF). Tuy nhiên, khi đánh giá tổng thể, bài báo sử dụng hai chỉ số chính là độ chính xác toàn cục (Overall Accuracy – OA) và hệ số Kappa để so sánh hiệu suất giữa hai thuật toán. Kết quả cho thấy RF đạt OA là 86,6% và hệ số Kappa là 0,83, cao hơn đáng kể so với SVM với các giá trị tương ứng là 77,4% và 0,71. Điều này cho thấy RF có hiệu suất phân loại tổng thể tốt hơn, đồng thời thể hiện mức độ ổn định và nhất quán cao hơn so với SVM. Mặt khác, xét trên khía cạnh phân bố không gian của các lớp phủ bề mặt, thuật toán Random Forest cho thấy khả năng phân vùng ranh giới rõ ràng giữa các đối tượng, đồng thời duy trì được cấu trúc mịn và liên tục trong không gian. Đây là yếu tố quan trọng trong việc xây dựng các bản đồ lớp phủ có tính trực quan cao và có thể ứng dụng hiệu quả trong công tác quy hoạch, giám sát môi trường và quản lý tài nguyên. Ngược lại, kết quả phân loại từ thuật toán SVM mặc dù vẫn đạt độ chính xác tương đối, nhưng xuất hiện một số sai sót cục bộ, điển hình như nhầm lẫn giữa lớp đường giao thông và đất trống, hoặc giữa khu vực nhà ở và phương tiện giao thông. Những lỗi này có thể ảnh hưởng đến độ tin cậy của sản phẩm bản đồ trong thực tiễn.
3.1.3. Kết quả xây dựng bản đồ lớp phủ bề mặt
Thuật toán Random Forest không chỉ vượt trội về mặt thống kê thể hiện qua hệ số Kappa mà còn ổn định hơn về mặt không gian, mang lại kết quả trực quan rõ ràng và đáng tin cậy hơn, do đó kết quả phân loại của RF phù hợp hơn cho mục tiêu xây dựng bản đồ lớp phủ bề mặt trong nghiên cứu này (Hình 6).
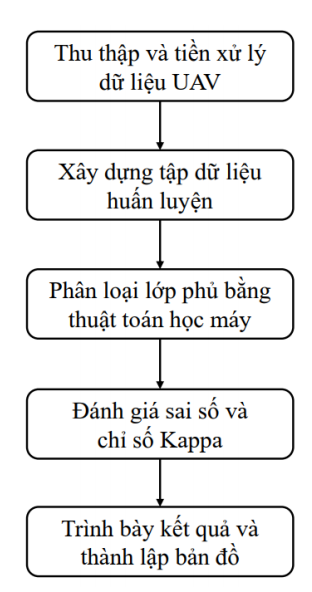
Ngoài ra, diện tích của các loại lớp phủ bề mặt đã được tính toán và tổng hợp thể hiện ở Hình 9. Kết quả thống kê cho thấy, thực vật chiếm diện tích lớn nhất với 27.166,77 m², khu vực hiện tại có tỷ lệ cây xanh rất cao. Nhà đứng thứ hai với 19.729,07 m², cho thấy mật độ xây dựng dân cư cũng khá lớn. Mặt nước (11.366,61 m²) và đất trống (10.344,40 m²) có diện tích ở mức trung bình, đóng góp một phần đáng kể vào tổng diện tích. Các lớp phủ còn lại như bãi đậu xe, đường giao thông, phương tiện và thuyền đều có diện tích nhỏ hơn nhiều (dưới 4.100 m²), cho thấy các hạng mục hạ tầng và phương tiện chỉ chiếm một phần nhỏ so với diện tích tự nhiên và khu dân cư. Nhìn chung, cơ cấu lớp phủ thiên về thảm thực vật, đất trống, mặt nước và khu dân cư, trong khi các yếu tố hạ tầng và phương tiện chiếm tỷ lệ thấp hơn.
Hình 9. Biểu đồ thống kê diện tích lớp phủ
Qua kết hợp bản đồ lớp phủ và biểu đồ có thể nhận thấy khu vực còn nhiều quỹ đất và không gian để phát triển trong tương lai. Lớp phủ thực vật tuy chiếm diện tích lớn nhưng phần lớn là cây thấp xen kẽ với các dải đất trống tập trung ở trung tâm và phía Đông Bắc của khu vực. Các khu này bằng phẳng, tiếp giáp trực tiếp với tuyến đường ven sông, tạo điều kiện thuận lợi cho việc mở rộng đô thị hoặc xây dựng hạ tầng.
3.2. Thảo luận
Kết quả thực nghiệm cho thấy các lớp phủ bề mặt trên ảnh trực giao được xử lý từ dữ liệu UAV đã được phân loại một cách hiệu quả nhờ ứng dụng các thuật toán học máy với độ chính xác của hệ số Kappa đạt 0,83 đối với Random Forest (RF) và hệ số Kappa đạt 0,71 đối với Support Vector Machine (SVM). Điều này chứng minh rằng cả hai thuật toán đều có khả năng học tốt từ tập mẫu huấn luyện, cho phép nhận dạng và phân biệt các lớp phủ khác nhau với độ chính xác tương đối cao. Trong đó, thuật toán RF thể hiện ưu thế rõ rệt hơn không chỉ về độ chính xác tổng thể, tuy nhiên thuật toán SVM đạt hiệu quả khá tốt ở một số lớp khó như phương tiện và thuyền, thể hiện qua độ chính xác người dùng cao hơn so với Random Forest (RF). Bởi thuật toán RF đạt hiệu quả cao hơn có thể xuất phát từ bản chất của thuật toán là một mô hình học máy dạng tổ hợp nhiều cây quyết định giúp giảm thiểu hiện tượng quá khớp (overfitting) và tăng cường độ ổn định trong kết quả phân loại. Trong khi đó, SVM mặc dù mạnh trong các bài toán phân tách tuyến tính hoặc phi tuyến, nhưng lại nhạy cảm với nhiễu và chất lượng dữ liệu huấn luyện, điều này phần nào ảnh hưởng đến hiệu quả phân loại khi áp dụng trên dữ liệu UAV có độ phức tạp cao [1,8].
Việc tích hợp công nghệ UAV với các thuật toán học máy, điển hình như RF không chỉ mang lại nguồn dữ liệu có độ phân giải cao, mà còn tạo điều kiện thuận lợi cho quá trình lựa chọn mẫu huấn luyện nhờ khả năng nhận diện trực quan các đối tượng trên ảnh. Điều này không những giúp tăng độ chính xác của kết quả phân loại, mà còn góp phần nâng cao hiệu quả trong công tác xây dựng bản đồ lớp phủ bề mặt, từ đó phục vụ tốt hơn cho công tác quản lý và quy hoạch đô thị. Tuy nhiên, bài báo vẫn còn gặp một số hạn chế nhất định như trong quá trình xử lý ảnh UAV mất nhiều thời gian, đồng thời việc tạo điểm đám mây (Point Cloud) chỉ dừng ở mức độ High thay vì mức Highest do hạn chế về cấu hình phần cứng, đã làm cho mật độ điểm đám mây chưa đủ dày đặc để mô tả chi tiết các đối tượng trên bề mặt đất. Mặc dù, kết quả phân loại lớp phủ khá tương đồng với ảnh trực giao độ phân giải cao nhưng chưa phản ánh chính xác thực tế do còn sai sót, vì thế cần tiến hành chọn mẫu nhiều hơn và đa dạng hơn giúp nâng cao độ chính xác. Ngoài ra, để nâng cao độ tin cậy trong kết quả phân loại, một hướng tiếp cận tiềm năng là kết hợp công nghệ UAV với các thuật toán học sâu (Deep Learning), đặc biệt là những mô hình dựa trên mạng nơ-ron nhân tạo (Artificial Neural Networks). Các mô hình học sâu có khả năng tự động học và trích xuất đặc trưng từ dữ liệu ảnh UAV với độ chính xác cao, nhờ vào cấu trúc nhiều lớp và khả năng xử lý dữ liệu phức tạp. Sự kết hợp này không chỉ giúp cải thiện độ chính xác trong phân loại lớp phủ bề mặt mà còn tạo tiền đề cho việc xây dựng các hệ thống giám sát thông minh, phục vụ hiệu quả công tác quy hoạch và quản lý đô thị [7,15].
4. Kết luận
Việc tích hợp công nghệ UAV và các thuật toán học máy không chỉ giúp khắc phục những hạn chế của các phương pháp truyền thống trong phân loại ảnh viễn thám, mà còn mở ra một hướng tiếp cận hiện đại trong xử lý và phân tích dữ liệu lớn với độ phân giải cao. Kết quả thực nghiệm cho thấy, thuật toán SVM đạt hiệu quả khá tốt ở một số lớp khó như phương tiện và thuyền, thể hiện qua độ chính xác người dùng cao hơn so với Random Forest (RF). Tuy nhiên, khi đánh giá tổng thể dựa trên các chỉ số độ chính xác toàn cục (Overall Accuracy – OA) và hệ số Kappa là những thước đo phản ánh hiệu suất phân loại, trong đó thuật toán RF lại cho kết quả vượt trội hơn, với OA đạt 86,6% và hệ số Kappa là 0,83, so với các giá trị tương ứng của SVM là 77,4% và 0,71. Điều này cho thấy RF không chỉ đảm bảo độ chính xác cao, mà còn thể hiện tính ổn định và nhất quán hơn trong toàn bộ quá trình phân loại. Do đó, thuật toán Random Forest được đánh giá là phù hợp hơn cho mục tiêu xây dựng bản đồ lớp phủ bề mặt từ dữ liệu ảnh UAV. Những kết quả đạt được góp phần củng cố tiềm năng ứng dụng rộng rãi của công nghệ UAV trong giám sát tài nguyên đất đai, hỗ trợ quá trình ra quyết định trong quy hoạch đô thị và quản lý môi trường. Qua đó, nghiên cứu khẳng định triển vọng của việc tích hợp UAV với các mô hình học máy như một giải pháp hiệu quả trong phân tích dữ liệu không gian hiện đại, phục vụ cho quản lý đô thị thông minh và phát triển bền vững.
Cam kết của các tác giả
Tất cả các tác giả có tên trong bài báo cam kết sự đồng thuận và không có xung đột lợi ích trong công bố khoa học tại bài báo này.
Tài liệu tham khảo
[1] Ivosevic, Bojana & Pajević, Nina & Brdar, Sanja & Waqar, Rana Muhammad & Khan, Maryam & Valente, João. “Comprehensive dataset from high resolution UAV land cover mapping of diverse natural environments in Serbia”. Scientific Data. Vol. 12. page 11-12, 2025
[2] Trần Ngọc Huyền Trang, Trần Thị Kim Oanh, Lê Trung Chơn. “Kết hợp thiết bị bay không người lái (UAV) và GIS xây dựng dữ liệu phục vụ quản lý cây xanh đô thị”. Tạp chí Khí tượng Thủy văn. EME4, trang 139-148, 2022
[3] Võ Quốc Tuấn, Nguyễn Tấn Lợi, Quãng Thị Dal Trương Chí Quang và Phạm Quốc Việt. “Ứng dụng công nghệ UAV (drones) theo dõi và hỗ trợ cảnh báo sớm dịch hại vùng canh tác lúa tỉnh Sóc Trăng”. Tạp chí Khoa học Trường Đại học Cần Thơ. Tập 57, 28-38, 2021
[4] Phan Nguyên Việt, Nguyễn Hữu Đức, Chung Minh Quân, Phùng Ngọc Anh. “Ứng dụng công nghệ UAV kết hợp WebGIS trong đo vẽ địa hình phục vụ khảo sát, thiết kế công trình”. Tạp chí Khí tượng Thủy văn. EME4, trang 181-192, 2022
[5] Hà Quý Quỳnh, Nguyễn Văn Sinh, Đặng Huy Phương, Nguyễn Quảng Trường. “Sử dụng máy bay không người lái (UAV) chụp ảnh phục vụ nghiên cứu cấu trúc các hệ sinh thái núi khu vực Tây Nguyên”. Tạp chí Khoa học và Công nghệ Việt Nam. Tập 8, trang 30-33, 2020.
[6] Taposh Mollick, Md Golam Azam, Sabrina Karim. “Geospatial-based machine learning techniques for land use and land cover mapping using a high-resolution unmanned aerial vehicle image”. Remote Sensing Applications: Society and Environment. Vol.29, page 100859, 2023
[7] Tejendra Kumar Yadav, Polpreecha Chidburee, Nattapon Mahavik. “Land Cover Classification Based on UAV Photogrammetry and Deep Learning for Supporting Mine Reclamation: A Case Study of Mae Moh Mine in Lampang Province, Thailand”. Applied Environmental Research. Vol43(4), page 39-54, 2021
[8] Sultana S, Inayathulla M. “Precision Land Use and LandCover Classification Using GoogleEarth Engine: Integrating RandomForest and Support Vector MachineAlgorithms”. Geo-Eye. Vol.11(2), page 9-14, 2022
[9] Breiman, L. “Random Forests. Machine Learning”. Springer Nature. Vol 45(1), 5–32, 2001.
[10] Cortes, C., & Vapnik, V. “Support-vector networks”. Machine Learning”. Springer Nature. Vol. 20(3), page 273–297, 1995
[11] Xu, Saiping & Zhao, Qianjun & Yin, Kai & Zhang, Feifei & Liu, Dingbang & Guang, Yang. “Combining random forest and support vector machines for object-based rural-land-cover classification using high spatial resolution imagery”. Journal of Applied Remote Sensing. Vol.13, page 1-25, 2019
[12] Mountrakis, G., Im, J., & Ogole, C. “Support vector machines in remote sensing: A review”. ISPRS Journal of Photogrammetry and Remote Sensing. Vol. 66(3), page 247–259, 2011
[13] Vũ Xuân Định. “Ứng dụng công nghệ UAV và WebGIS trong xây dựng bản đồ 3D trực tuyến”. Tạp chí Khí tượng Thủy văn. Tập 771, trang 1-14, 2025
[14] Cohen, J. A coefficient of agreement for nominal scales. Educational and Psychological Measurement. Vol. 20(1), page 37–46, 1960
[15] Trần Ngọc Huyền Trang. “Tích hợp ảnh UAV, Deep Learning và WebGIS phục vụ công tác quản lý cây xanh đô thị -Trường hợp nghiên cứu tại TP.HCM”. Tạp chí Xây dựng. Trang 118-123, 07/2025.
| Article © 2024 by Magazine of Geodesy - Cartography is licensed under CC BY 4.0 |
|